
Porównanie wersji AutoTURN.
AutoTURN jest dostępny w trzech wersjach.
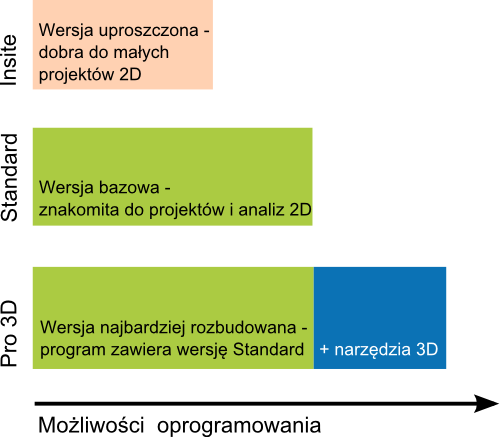
Bazowym programem jest AutoTURN Standard, nazywany często także samym określeniem AutoTURN. Lite (dawniej INSITE) to uproszczona, okrojona wersja bazowa, posiada np. możliwość definicji tylko ograniczonej liczby segmentów trajektorii. Natomiast Professional 3D, zawiera w sobie Standard, oraz jest wzbogacony o funkcje analizy w przestrzeni (3D), np. jazda nie tylko po płaszczyźnie, ale po ukształtowanym terenie.
To wersja archiwalna porównania programu CAD do badania przejezdności AutoTURN. Porównanie było tworzone dla wersji v10 AutoTURN. Obecnie producent zrezygnował z wersji Lite (InSite). Aktualne porównanie dostępne jest tutaj.
Poniższy wykres w orientacyjny sposób ukazuje różnice pomiędzy wersjami.
W tabeli poniżej zestawiliśmy różnice pomiędzy wersją bazową a uproszczoną.
| Funkcje | AutoTurn Standard | AutoTurn Lite (dawniej |
| Tor ruchu pojazdu oraz symulacja skrętu i nawracania. | ||
| Maksymalna liczba generowanych sekcji toru ruchu pojazdu. | bez ograniczeń | 20 |
| Maksymalna liczba części z któych składa się pojazd przy sprawdzeniu trajektorii jazdy w przód. | 20 | 2 |
| Maksymalna liczba części z któych składa się pojazd przy sprawdzeniu trajektorii jazdy w tył. | 4 | 1 |
| Możliwość tworzenia przekroju liniowego |  | |
| Uwzględnianie stosunku pomiędzy przednimi sterowanymi kołami oraz tylnimi. | | |
| Narzędzie SmartPath do generowania ścieżki łukowej symulacji ruchu pojazdu. | | |
| Narzędzie SmartPath do generowania ścieżki narożnej symulacji ruchu pojazdu. | |  |
| Poruszanie pojazdem za wskaźnikiem myszki po ekranie. | | |
| Możliwość tworzenia analizy ocbiążeń | | |
| Możliwość tworzenia linii widoczności oraz ich analizy | | |
| Symulacja nadsterowności pojazdów podczas symulacji | | |
| Wybór kąta przeciągnięcia pojazdu dla ścieżki narożnej oraz nadsterownej | | |
| Określenie tylnego stosunku powiązania kierownicy pomiędzy przednimi i tylnymi kołami. | | |
| Pojazdy specjalizowane i specjalne. | ||
| Wsparcie dla dwóch niezależnych tylnich kół sterujących. | | |
| Tworzenie i symulacja pojazdów sterowanych z tyłu. | | |
| Ruch pojazdu | ||
| Poruszanie pojazdem wzdłuż narysowanej ścieżki. | | |
| Poruszanie pojazdem przy założeniu minimalnej odległości od przeszkody. | | |
| Prezentacja wyników | ||
| Animacja symulacji pojazdu przejeżdzającego ścieżkę. | | |
| Generowanie, zapis i eksport prezentacji do pliku AVI | | |
| Opcje wyświetlania | ||
| Wyświetlanie promienia od ściany do ściany, od krawężnika do krawężnika, wewnętrznego i osiowego. | | |
| Realistyczne rzuty pojazdów. | | |
| Obsługa pojazdu z pomniejszonymi narożnikami. | | |
| Opcje dostosowywania i raportów | ||
| Tworzenie własnych pojazdów | | |
| Generowanie raportów skrętu i kątów przegubów | | |
| Biblioteka pojazdów | ||
| Możliwość sortowania według regionu występowania, typie, klasie, numeru części. | | |
| Możliwość sterowania wyświetlaniem zainstalowanychbibliotek pojazdów. | | |
| Zawiera posortowane typy pojazdów (Straż Pożarna, Użytkowe, itp) | | |
| Standardy bibliotek pojazdów | ||
| USA: AASHTO 20011 (USA) | CALTRANS 2008 (USA) | TAC (CAN) | | do kupienia osobno |
| AUSTRALIA: AUSTROADS 2006 (AU) | NEW ZEALAND 2007 (NZ) | | do kupienia osobno |
| UE: PL | UK | FR | DE | NL | DK | AUT | FI | NO | CH | CZ | IT | SE | IS | | do kupienia osobno |
| Rozszerzona biblioteka pojazdów. | do kupienia osobno | do kupienia osobno |
| Wymagania systemowe i programowe | ||
| Wsparce dla systemów 64-bit i Windows 7 | | |
| Zgodność z programem CAD - ZWCAD Pro 2017 | | |
| Wsparcie dla Autodesk® AutoCAD® 2010 – 2017 | | |
| Zobacz wszystkie wymagania sprzętowe | ||