Zasada ACKERMANa
| Wyrażenie | Main definition |
|---|---|
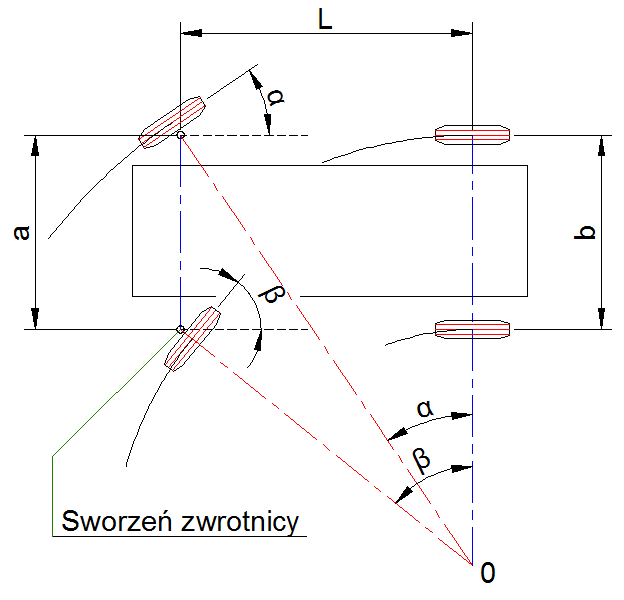
| Zasada ACKERMANa | Definiuje kąty skręcenia kół podczas jazdy po krzywiźnie. Aby samochód mógł poruszać się po krzywiźnie bez poślizgu kół jezdnych, niepożądanego z uwagi na możliwość zarzucenia pojazdu i przedwczesne zużywanie się opon, układ kierowniczy powinien ustawiać koła kierowane w sposób zapewniający toczenie się kół kierowanych po łukach o wspólnym środku krzywizny, leżącym na przedłużeniu osi obrotu tylnych kół samochodu.
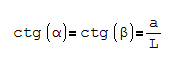
Zasadę ACKERMANa można opisać wzorem:
gdzie:
Reguła ACKERMANa ma także zastosowanie w AutoTURN. Gdybyśmy zobaczyli na układ kół kierowanych (kąty skręcenia) to okaże się, że koła skręcają się dokładnie wedle tej reguły.
Warunek ten jest zrozumiały i wydaje się prosty do zrealizowania, jednak zapewnienie takiego realnego układu kinematycznego jest praktycznie niemożliwe bez układu kierowniczego składającego się z kilkunastu przegubowo połączonych drążków. W samochodach stosuje się więc rozwiązanie uproszczone i dające przybliżone wartości kątów. Rozwiązaniem tym jest trapez kierowniczy, którego boki nierównoległe leżą na prostych, które przecinają się we wspólnym punkcie z osią obrotu tylnych kół pojazdu. Aby napędzane koła jednej osi mogły jeździć po łuku, oś musi być wyposażona w mechanizm różnicowy. Pozwala on na zróżnicowanie prędkości kół.
Reguła ACKERMANA leży u podstaw konstrukcji, ale często zachodzi potrzeba wykonania pewnej korekcji kątów skrętu kół na etapie doboru trapezu kierowniczego. W teorii koło jest ustawione prostopadle do podłoża, w praktyce jest ono pochylone w kilku kierunkach, np. pochylenie sworznia zwrotnicy, kąt wyprzedzenia, zbieżność kół (tymi parametrami można również sterować). Samochód może mieć np. silnik z przodu, centralnie lub z tyłu, co powoduje zupełnie inny rozkład masy, co przekłada się na kąty znoszenia kół, które zmieniają chwilowy środek obrotu powodując nadsterowność (pierwszy zaczyna ślizgać się tył pojazdu - najczęściej samochody z tylnym napędem) lub podsterowność pojazdu (na zakręcie zaczynają się ślizgać koła przednie - przeważnie samochody z przednim napędem). W takich przypadkach można minimalnie zwiększyć lub zmniejszyć kąty skrętu kół, obliczonych według zasady ACKERMANa, co znacząco może poprawić zachowanie w zakrętach (ustabilizować pojazd). Często tych korekt dokonuje się przy okazji testowania pojazdu. Nikt obecnie nie zaczyna produkcji pojazdu zupełnie "od zera". Pojazdy wyróżniają się nadwoziem i wyposażeniem, ale układ jezdny, kierowniczy i silnik często jest bardzo podobny do poprzedniego modelu. Można więc wiedząc np. że zmniejszy się masa pojazdu, już na etapie projektowania założyć pewne zmiany w układzie kierowniczym pojazdu.
|